Position Sensing
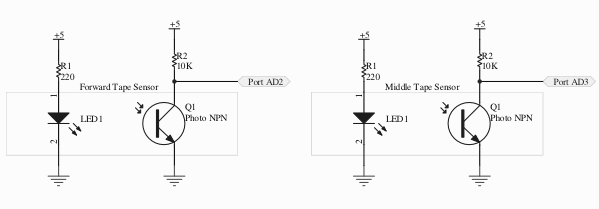
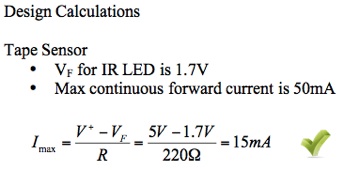
Two tape sensors were mounted to the bot, one at front and the other placed in the middle. The middle sensor was used as a guide for the robot to recognize where its centroid, and thus, the drive train wheels were located.
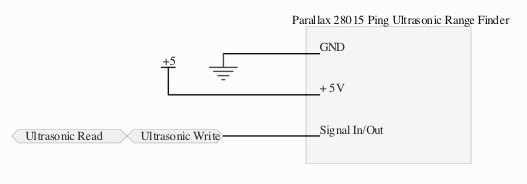
The Parallax Ultrasonic Range Finder was built into the front face of the bot. It was calibrated to report the robot’s distance from interference due to walls (and potentially other bots) at a precision of centimeters.