Motor Drivers
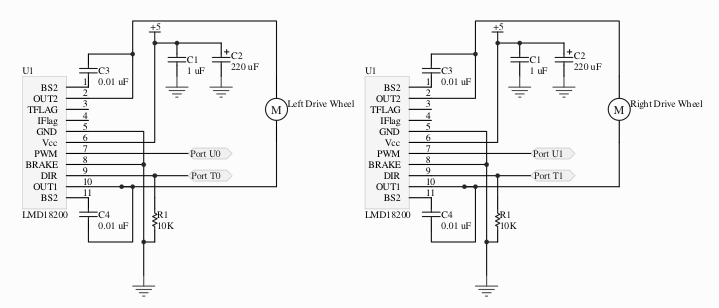
The motors for the left and right wheel were controlled using Drive-Brake mode and were powered by LMD18200 H-bridges. The brake line was tied low and the PWM was set to 0% duty cycle in order to brake.
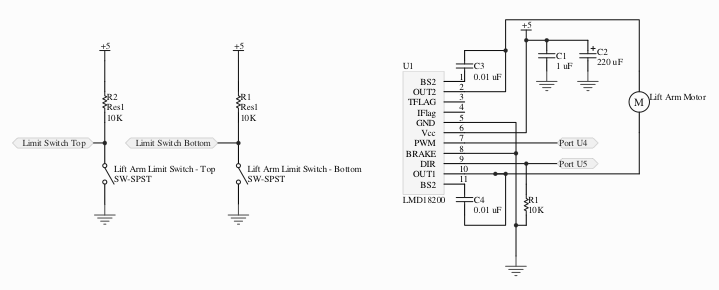
The top and bottom limit switches were used to communicate the position of the lift arm to the micro-controller. As with the drive motors, the lift arm motor was controlled with a LMD18200 H-bridge and ran in Drive-Brake Mode.