Arm Mechanism
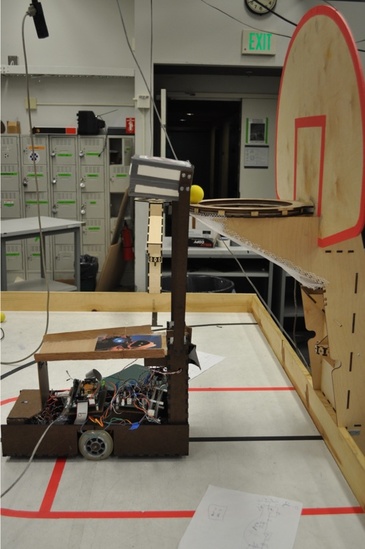
The arm mechanism consists of three main components: the lift motor, two arms, and the collection box. This system was optimized to effectively collect balls from the dispenser and deposit them into the two-foot tall hoop.
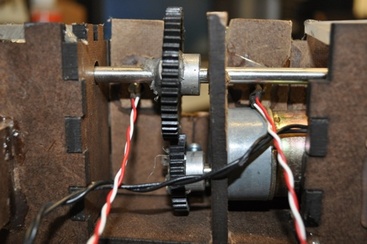
A DC geared motor with an additional 5:2 gear ratio powered the lift arms and collection box. The top gear is fixed to a ¼ inch shaft with a spider coupling.
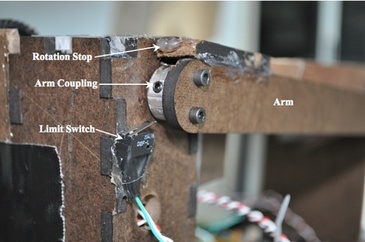
At the top of the support column, the arms were attached to a ¼ inch shaft using custom machined couplings. When the arms rotated upward to deposit balls, the rotation stop depressed a limit switch, which turned off the motor.
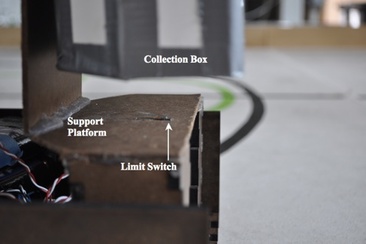
We created a platform to support the ball collection box at its lowest position. A limit switch on the platform indicates when the box had been completely lowered.

The ball collection box was attached to the arms using a lap joint.