The game rules were standard:
A few slight tweaks (since it’s the year 2011 after all):
The detailed project description is attached (PDF).
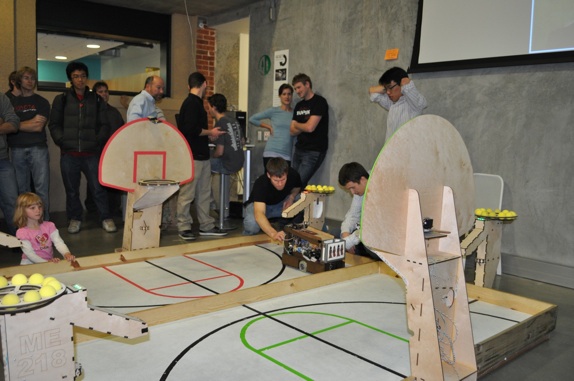
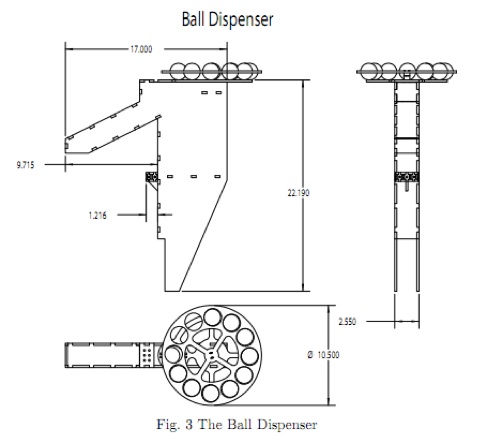
- Retrieve balls from the dispensers (two of which were available at a given moment in time) and get them into the basket.
- Teams of five were allowed - four humans and one autonomous robot.
A few slight tweaks (since it’s the year 2011 after all):
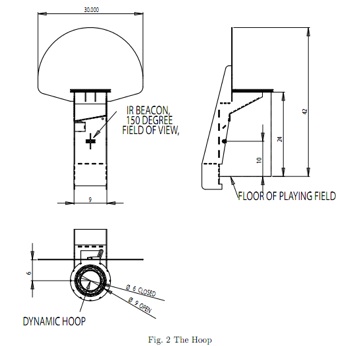
- The dispensers and baskets maintained built in beacons emitting IR radiation at various frequencies and pulse-widths.
- The field interacted with the robots through SPI (Serial Peripheral Interface) communication. The bots had to query dispensers to request for balls and could change the hoop size; the smaller hoop was worth 3 points (instead of 2) .
The detailed project description is attached (PDF).