Design Overview
Detailed explanations of the design can be found in the Mechanical, Electrical, and Software sections.
Early in the prototyping stage, it became clear that a dunking strategy would require the least calibration.
Early in the prototyping stage, it became clear that a dunking strategy would require the least calibration.

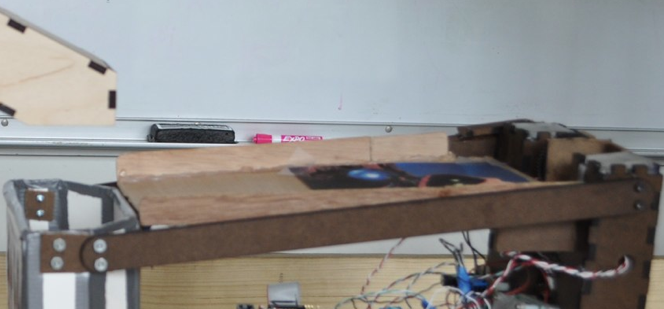
We chose to use a tilted ramp as a collector onto which dispensed balls could drop. This allowed us to catch balls from the dispenser even with some error in robot positioning.
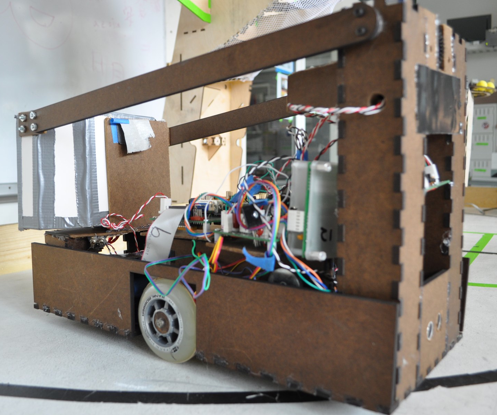
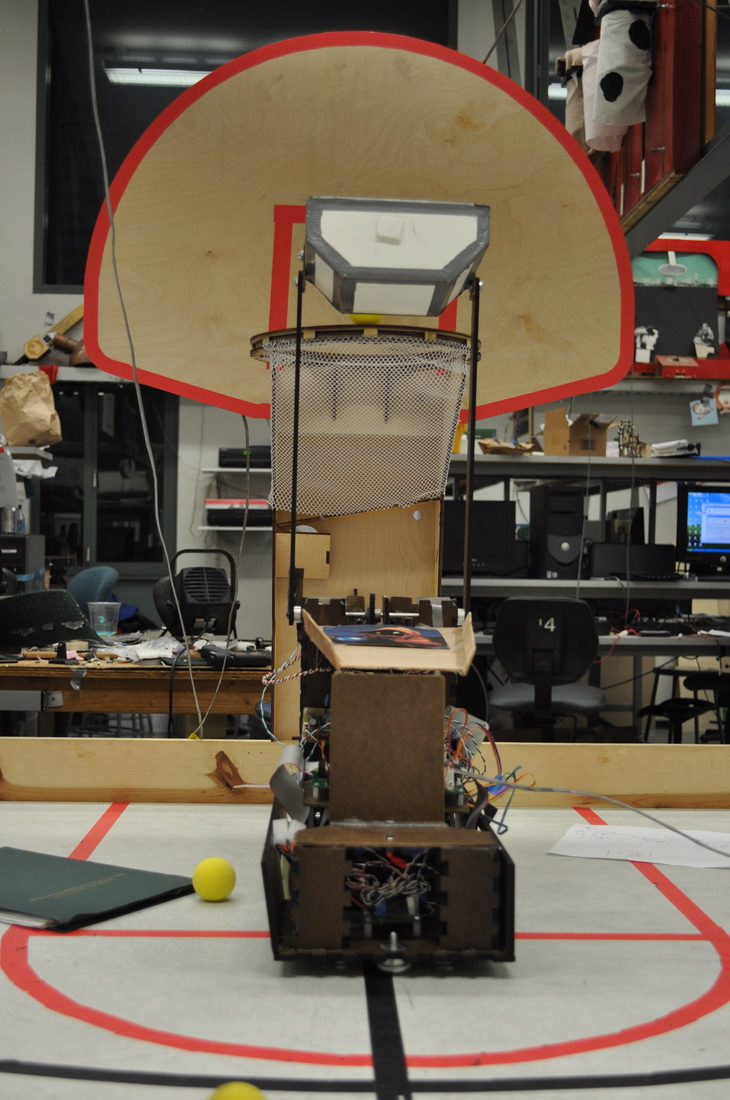
We chose to dunk by lifting the ball collector all the way up to the hoop. This placed severe restrictions on the overall design, so we had to make the robot tall, long, and narrow to fit within the design rules.