Axel Rover
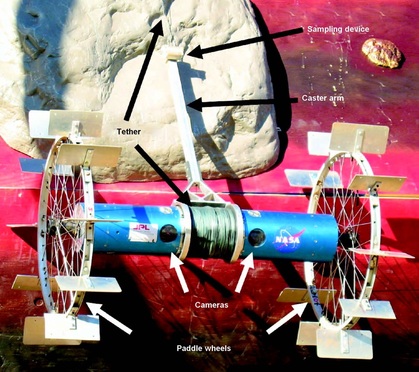
The goal of my Caltech senior thesis was to develop a model of paddle wheel soil interaction for the Axel rover, a tethered two wheel robot designed for extreme terrain (especially Mars). I worked on experimental modeling and applying the results to motion planning strategies.
I conducted tests to develop motion planning algorithms that would enable Axel to successfully navigate through different soil types and slope angles without getting stuck, while optimizing power usage. We found that slip ratio increased roughly linearly with increasing wheel speed and increased drastically with increased slope angle. Slip ratio was about 2 times higher for loose sand than for compact sand. Power usage increased linearly with slope angle, and was over 1.5 times higher in loose sand than in compact sand.
One of the biggest lessons of the project was that the rover is better off crossing loose soil than any incline greater than 5° (from a power efficiency perspective).
For more details, see the final thesis.