SLAM on Neato XV-21
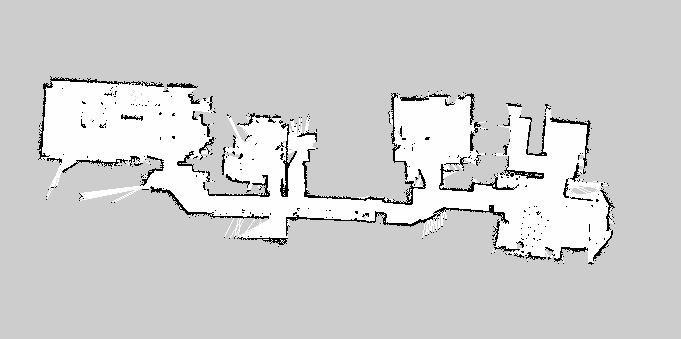
To brush up on the robot programming I had done in CS225b, I made a map of my apartment using a Neato XV-21 vacuum robot. The Neato robots are a common low-cost robotics platform because they include a spinning Lidar sensor.
The required hardware was:
- Neato XV-21 vacuum robot
- Raspberry Pi 2 with WiFi dongle (newer Pis have WiFi built in)
- USB Mini B to A cable (connects XV-21 to Pi)
- Cell phone battery charger (to power the Pi)
- A laptop with ROS (to monitor and control the robot in RVIZ)
A basic outline of my steps:
- Installed Ubuntu 14.04 on the Pi
- Installed a barebones version of ROS Indigo on the Pi
- Assigned IPs to the Pi and laptop
- Downloaded neato_robot source code
- Followed the Turtlebot tutorial to run SLAM and create a house map