JPL Robot Arm
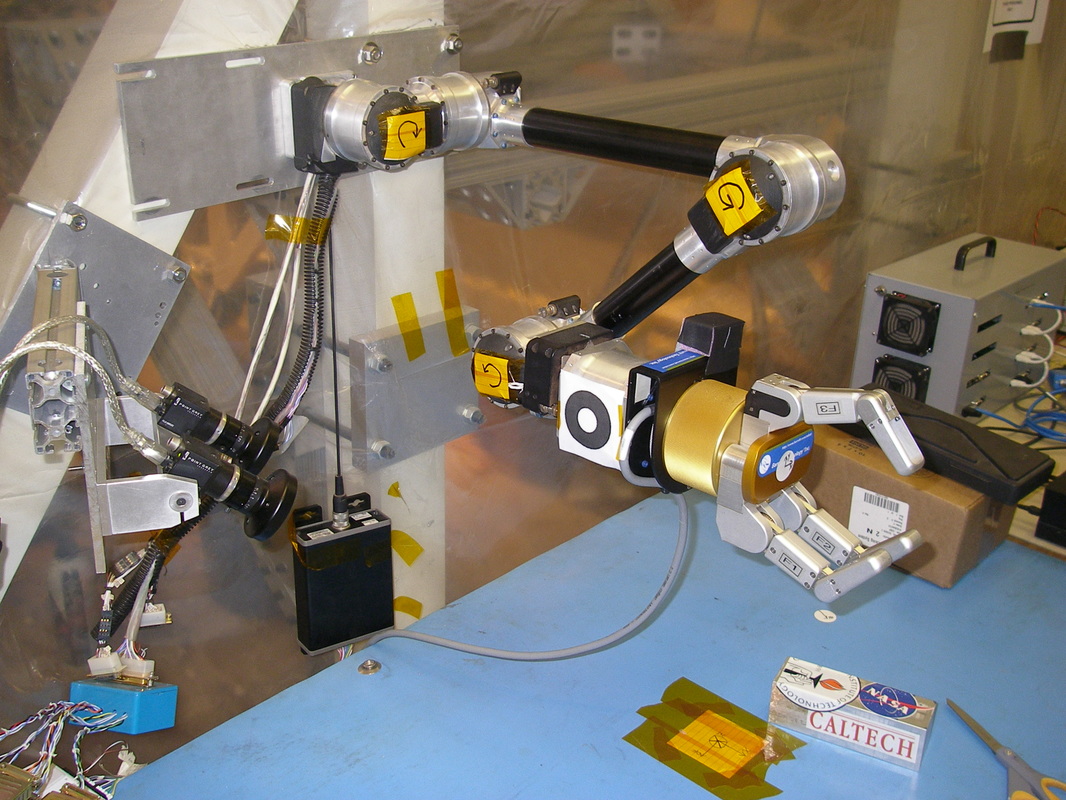
Over the summer of 2010, I worked on adaptive force control of a robotic arm as part of the DARPA ARM-S project. I started by writing software modules to handle grasping, adaptive modeling, and force control. My final task was to design an adaptive control law that would allow a robotic arm to write on surfaces of different stiffness. I used an integral force control law to set the downward contact force, combined with x,y,z position control to sketch out the desired picture. See the videos below for the results.
Successful writing involved two steps:- An exploratory phase where we identified the surface stiffness. This stiffness value determined the integral gain for the control law. Stiffness values varied by up to an order of magnitude for soft vs. hard surfaces.
- A writing phase where we used force control and trajectory following to sketch a picture. Force control was unstable if we used the same gain for soft and hard surfaces, thus the need for an adaptive control solution.
Writing on a slope demonstrated the robustness of the force control law in responding to gradual, large scale disturbances.
The control law was also robust in rejecting sudden, small scale disturbances.
For more detail, see the project final presentation.